KITTI数据集介绍
本文共 735 字,大约阅读时间需要 2 分钟。
目录
1、KITTI数据集概述
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成[1] ,以10Hz的频率采样及同步。
2、kitti数据采集平台
KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。图示为传感器的配置平面图,为了生成双目立体图像,相同类型的摄像头相距54cm安装。由于彩色摄像机的分辨率和对比度不够好,所以还使用了两个立体灰度摄像机,它和彩色摄像机相距6cm安装.
传感器: 坐标以及传感器布置如下所示:
坐标以及传感器布置如下所示: 

3、Kitti数据集标注格式


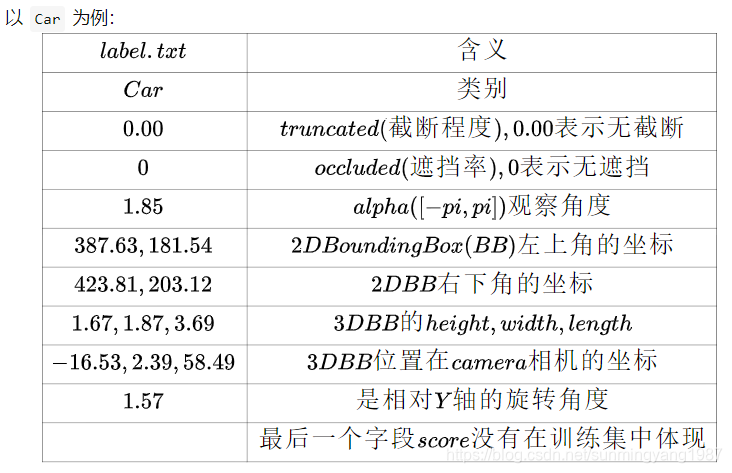 注意: (1)’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。 (2)如果是训练集,最后没有score这个参数。
注意: (1)’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。 (2)如果是训练集,最后没有score这个参数。 参考文献:
1、
2、 3、 4、转载地址:http://btrti.baihongyu.com/
你可能感兴趣的文章
【js设计模式笔记---代理模式】
查看>>
【js设计模式笔记---观察者模式】
查看>>
【学习笔记javascript设计模式与开发实践----1】
查看>>
【学习笔记javascript设计模式与开发实践(this、call和apply)----2】
查看>>
Javascript闭包的几种写法及用途
查看>>
2016十家公司前端小记
查看>>
【学习笔记javascript设计模式与开发实践(闭包和高阶函数)----3】
查看>>
【学习笔记javascript设计模式与开发实践(单例模式)----4】
查看>>
【学习笔记javascript设计模式与开发实践(策略模式)----5】
查看>>
【学习笔记javascript设计模式与开发实践(代理模式)----6】
查看>>
【学习笔记javascript设计模式与开发实践(迭代器模式)----7】
查看>>
【学习笔记javascript设计模式与开发实践(发布--订阅模式)----8】
查看>>
【学习笔记javascript设计模式与开发实践(命令模式)----9】
查看>>
【学习笔记javascript设计模式与开发实践(组合模式)----10】
查看>>
webpack多页应用架构专题系列
查看>>
webpack多页应用架构专题系列 1
查看>>
webpack多页应用架构专题系列 2
查看>>
webpack多页应用架构专题系列 3
查看>>
webpack多页应用架构专题系列 4
查看>>
PHP 高级编程之多线程
查看>>